
開封激光雷達測角度



更新時間:2024-11-10 07:00:00
價格:¥30000/個
測試:激光雷達點云質量評價、分辨率、測程、誤差等
認證類型:強制認證
類別:激光雷達檢測
聯系電話:19925421159
聯系手機: 19925421159
聯系人:黃工
讓賣家聯系我
詳細介紹
激光雷達通過檢測道路邊沿,擬合三次曲線方程,從而將道路以外的點剔除。常用方法包括:
1、柵格化后根據網格內點云的高度差判斷路沿點;
2、對同一條掃描線上的點集,計算曲率變化,從而判斷路沿點;
3、根據點云法向量的變化,求取路沿點;
以上方法也可混合使用,優化檢測效果。
汽車使用的雷達主要有三種:
1、超聲波雷達:這是一種很常見的傳感器,主要用于短距離障礙物探測,比如倒車雷達,平時倒車時發出的滴滴聲,是超聲波雷達給出的反饋。它的優點是成本低,測距方法簡單,適合短距離測量。
2、毫米波雷達:工作原理和超聲波雷達類似,但它更進了一步,多用于測距離、速度和方位。優點是分辨率高,反應速度敏捷,不受天氣影響,能夠穿透霧、煙、灰塵等,測量距離更遠,一般在150-250米之間。
3、激光雷達:優點是探測范圍廣,獲取距離和位置的精度更高,能生成三維的位置信息,快速確定目標的位置、大小、外貌和材質,在遠、小障礙物、近距離加塞等場景有優勢。

激光雷達有哪些優勢:
1、激光雷達可以準確估計障礙物的位置。到目前為止,我們還沒有更準確的方法來做到這一點。
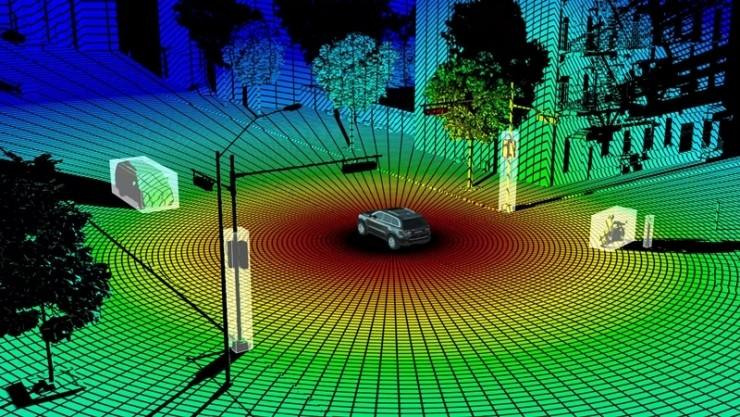
2、如果我們看到車輛前面的激光雷達生成的點云,即使障礙物檢測系統沒有檢測到任何東西,我們也可以停下來。
激光雷達的優點:
1、分辨率高
激光雷達可以獲得高的角度、距離和速度分辨率。通常角分辨率不低于0.1mard也是說可以分辨3km距離上相距0.3m的兩個目標(這是微波雷達無論如何也辦不到的),并可同時跟蹤多個目標;距離分辨率可達0.lm;速度分辨率能達到10m/s以內。距離和速度分辨率高,意味著可以利用距離——多譜勒成像技術來獲得目標的清晰圖像。分辨率高,是激光雷達的顯著的優點,其多數應用都是基于此。
2、隱蔽性好、抗有源干擾能力強
激光直線傳播、方向性好、光束非常窄,只有在其傳播路徑上才能接收到,因此敵方截獲非常困難,且激光雷達的發射系統(發射望遠鏡)口徑很小,可接收區域窄,有意發射的激光干擾信號進入接收機的概率低;另外,與微波雷達易受自然界廣泛存在的電磁波影響的情況不同,自然界中能對激光雷達起干擾作用的信號源不多,因此激光雷達抗有源干擾的能力很強,適于工作在日益復雜和激烈的信息戰環境中。
3、低空探測性能好
微波雷達由于存在各種地物回波的影響,低空存在有一定區域的盲區(無法探測的區域)。而對于激光雷達來說,只有被照射的目標才會產生反射,完全不存在地物回波的影響,因此可以“零高度”工作,低空探測性能較微波雷達強了許多。
4、體積小、質量輕
通常普通微波雷達的體積龐大,整套系統質量數以噸記,光天線口徑達幾米甚至幾十米。而激光雷達要輕便、靈巧得多,發射望遠鏡的口徑一般只有厘米級,整套系統的質量小的只有幾十公斤,架設、拆收都很簡便。而且激光雷達的結構相對簡單,維修方便,操縱容易,價格也較低。

激光雷達的障礙物檢測流程一般如下:
1、 考慮到車上有多個傳感器共同作業,需要對輸入的激光點云做時間同步和外參標定。
2、考慮到激光雷達的采樣噪聲和點云數據量大的問題,需要對點云做預處理,減少數據量,剔除噪聲點。
3、每幀點云數據中包含了大量的地面點,檢測的目的是獲取道路障礙物信息,需要進一步分割出地面上的點云。
4、地面上的障礙物點通常采用無監督的聚類算法形成多個團簇,每個團簇則表示一個障礙物。
5、針對團簇的物體識別可以根據任務需求而定,如果需要類別信息,可以采用特征提取+分類器的方式分類障礙物。
6、對每一塊團簇做包圍框擬合,計算障礙物屬性,比如中心點,質心點,長寬高等。
7、對每一個障礙物構建一個濾波器做跟蹤,平滑輸出。
我們公司經營理念: 一個中心:以客戶為中心! 一個承諾:一切讓您滿意! 公司的服務宗旨是:堅持"誠信求實、服務社會、信譽至上,顧客的滿意是我們追求。
1、柵格化后根據網格內點云的高度差判斷路沿點;
2、對同一條掃描線上的點集,計算曲率變化,從而判斷路沿點;
3、根據點云法向量的變化,求取路沿點;
以上方法也可混合使用,優化檢測效果。
汽車使用的雷達主要有三種:
1、超聲波雷達:這是一種很常見的傳感器,主要用于短距離障礙物探測,比如倒車雷達,平時倒車時發出的滴滴聲,是超聲波雷達給出的反饋。它的優點是成本低,測距方法簡單,適合短距離測量。
2、毫米波雷達:工作原理和超聲波雷達類似,但它更進了一步,多用于測距離、速度和方位。優點是分辨率高,反應速度敏捷,不受天氣影響,能夠穿透霧、煙、灰塵等,測量距離更遠,一般在150-250米之間。
3、激光雷達:優點是探測范圍廣,獲取距離和位置的精度更高,能生成三維的位置信息,快速確定目標的位置、大小、外貌和材質,在遠、小障礙物、近距離加塞等場景有優勢。
激光雷達有哪些優勢:
1、激光雷達可以準確估計障礙物的位置。到目前為止,我們還沒有更準確的方法來做到這一點。
2、如果我們看到車輛前面的激光雷達生成的點云,即使障礙物檢測系統沒有檢測到任何東西,我們也可以停下來。
激光雷達的優點:
1、分辨率高
激光雷達可以獲得高的角度、距離和速度分辨率。通常角分辨率不低于0.1mard也是說可以分辨3km距離上相距0.3m的兩個目標(這是微波雷達無論如何也辦不到的),并可同時跟蹤多個目標;距離分辨率可達0.lm;速度分辨率能達到10m/s以內。距離和速度分辨率高,意味著可以利用距離——多譜勒成像技術來獲得目標的清晰圖像。分辨率高,是激光雷達的顯著的優點,其多數應用都是基于此。
2、隱蔽性好、抗有源干擾能力強
激光直線傳播、方向性好、光束非常窄,只有在其傳播路徑上才能接收到,因此敵方截獲非常困難,且激光雷達的發射系統(發射望遠鏡)口徑很小,可接收區域窄,有意發射的激光干擾信號進入接收機的概率低;另外,與微波雷達易受自然界廣泛存在的電磁波影響的情況不同,自然界中能對激光雷達起干擾作用的信號源不多,因此激光雷達抗有源干擾的能力很強,適于工作在日益復雜和激烈的信息戰環境中。
3、低空探測性能好
微波雷達由于存在各種地物回波的影響,低空存在有一定區域的盲區(無法探測的區域)。而對于激光雷達來說,只有被照射的目標才會產生反射,完全不存在地物回波的影響,因此可以“零高度”工作,低空探測性能較微波雷達強了許多。
4、體積小、質量輕
通常普通微波雷達的體積龐大,整套系統質量數以噸記,光天線口徑達幾米甚至幾十米。而激光雷達要輕便、靈巧得多,發射望遠鏡的口徑一般只有厘米級,整套系統的質量小的只有幾十公斤,架設、拆收都很簡便。而且激光雷達的結構相對簡單,維修方便,操縱容易,價格也較低。
激光雷達的障礙物檢測流程一般如下:
1、 考慮到車上有多個傳感器共同作業,需要對輸入的激光點云做時間同步和外參標定。
2、考慮到激光雷達的采樣噪聲和點云數據量大的問題,需要對點云做預處理,減少數據量,剔除噪聲點。
3、每幀點云數據中包含了大量的地面點,檢測的目的是獲取道路障礙物信息,需要進一步分割出地面上的點云。
4、地面上的障礙物點通常采用無監督的聚類算法形成多個團簇,每個團簇則表示一個障礙物。
5、針對團簇的物體識別可以根據任務需求而定,如果需要類別信息,可以采用特征提取+分類器的方式分類障礙物。
6、對每一塊團簇做包圍框擬合,計算障礙物屬性,比如中心點,質心點,長寬高等。
7、對每一個障礙物構建一個濾波器做跟蹤,平滑輸出。
我們公司經營理念: 一個中心:以客戶為中心! 一個承諾:一切讓您滿意! 公司的服務宗旨是:堅持"誠信求實、服務社會、信譽至上,顧客的滿意是我們追求。

